本文目录
航模陀螺仪原理
陀螺仪扫盲
看到很多新手老是问几个常见问题,今天手痒,写个贴子扫扫盲。
1,陀螺仪是怎么工作的
陀螺仪说白了有两个部分:a,角速度传感器,b,纠偏电路。
角速度传感器用来检测某个轴向是否发生了偏转,最常见的就是直升机上,机尾是否发生了偏转,这个时候,这个轴就是直升机的主轴。就是说机尾把一动,传感器就告诉控制系统:我检测到了偏转,方向xx,转动速率 xx度/秒。
这时候纠偏电路就来了,经过计算后发出了纠偏信号:以xx的力度,向xx方向发出反映。这个反映在直升机上一般就是告诉尾舵机偏转多少角度,偏转方向是什么。
2,啥叫感度
其实问题1搞清楚了,这个问题就很简单,就是纠偏电路有多“疯狂”
感度高了,偏转速度只要高那么一点点,陀螺仪的控制电路发出的纠偏信号就更加强烈点。让舵机之类的转动角度更大些。
不是感度越高越好,反映过渡,你会发现直升机的尾巴来回摆。。本来就是阿,人家用了一点力气推一下你,用了2倍的力气顶。。你说你还能原地不动吗?动了传感器又来告状了。。
你不是白费力气阿。
3,啥叫锁定式陀螺仪?啥叫非锁定。
先说非锁定:这个陀螺仪比较初级,比较懒惰,啥时候他检测到了偏转信号,他就发出纠偏信号,反正按照感度值来吗,啥时候偏转信号没了,他也停了。
这种工作模式比较被动,外来干扰源,如果长时间,高强度的来,直升机就会慢慢跟随偏转,你可以把这种陀螺仪当作一个减速片,只不过减缓偏转程度罢了,时间长了,还是偏。
再说锁定:这种陀螺仪有一个积分电路,没学过高等数学?没关系,就是由个程序阿,他拿了支笔记录,噢,我现在已xx速度,偏转了xx秒,所以阿总共偏转了xx度,好啦我来纠偏,反正不纠正到原来的角度我不停。
4,啥叫双感度?
上面说了感度,因为感度比较死,陀螺仪也不知道直升机的转速是多少阿,要知道告高速状态和悬停状态下的尾桨转速不一样啊,同样的感度可不行,引此需要不同飞行状态人工切换感度。
双感度陀螺仪一般可以切换锁定/非锁定模式还能还能切换各个模式下的感度。。
5,都是双感度,都是锁定的,价格怎么差这么多阿。。
我说了,陀螺仪两个主要部件,传感器,控制电路。
传感器也有高低档的,有什么压电拉,smm,mems,df导弹上用的肯定激光的。反正记住一分价钱一分货,压电现在淘汰拉,建议不要买,除非你准备用在非锁定场合,还说得过去。
控制电路也是很重要的,你说阿,我刚才说的纠偏看似简单,但是每秒几百次上千次,而且情况千差万别。。不要小看,还要可靠。。精准。。打牌陀螺的程序可是高度机密。。。一些新品没过关就推向市场,空中失灵。。所以500以上你不可能看到有人用杂牌,怎么也要应该来个401吧。
陀螺仪原理介绍
陀螺仪的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向。然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。
现代陀螺仪是一种能够精确地确定运动物体的方位的仪器,它是现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器。传统的惯性陀螺仪主要是指机械式的陀螺仪,机械式的陀螺仪对工艺结构的要求很高,结构复杂,它的精度受到了很多方面的制约。自从上个世纪七十年代以来,现代陀螺仪的发展已经进入了一个全新的阶段。70年代提出了现代光纤陀螺仪的基本设想,到八十年代以后,光纤陀螺仪就得到了非常迅速的发展,与此同时激光谐振陀螺仪也有了很大的发展。由于光纤陀螺仪具有结构紧凑,灵敏度高,工作可靠等等优点,所以目前光纤陀螺仪在很多的领域已经完全取代了机械式的传统的陀螺仪,成为现代导航仪器中的关键部件。和光纤陀螺仪同时发展的除了环式激光陀螺仪外,还有现代集成式的振动陀螺仪,集成式的振动陀螺仪具有更高的集成度,体积更小,也是现代陀螺仪的一个重要的发展方向。
飞行方向陀螺仪的作用是控制航向,并能自动修正方向偏差,使飞行器沿预定的航线飞行。
传统的航模用陀螺仪一般为纯硬件速率控制模式,即采用P比例控制线性补偿技术,根据陀螺传感器实时检测机体旋转加速度以模拟信号输出,该信号经硬件电路跟踪放大并与一个多谐振荡器产生的方波共同整形,形成一个角位置偏差补偿控制信号,然后叠加到尾舵机控制信号上,一同控制尾舵机动作,从而实现自动修正航向。其存在的缺陷:由于仅采用P比例控制技术,对于比例控制而言,虽然控制响应速度快,但无法消除自控制误差,且由于机体旋转速度受环境影响变化快且复杂,即使硬件电路设计了PLL锁相环等自动跟踪电路,硬件电路仍然控制精度不高。那每次变化调整产生的稳态误差就不可避免,只要存在控制误差,则随时间的增长,累积到一定程度,其值可能变得很大,足以造成机体角位置漂移,也就是不锁尾或不锁头了。
而锁尾陀螺仪在原有技术的基础上通过增加了软件算法实现对控制误差的修正,使机体角位置飘移的现象得以大大的抑制,真正做到了锁尾。

手机三轴陀螺仪传感器
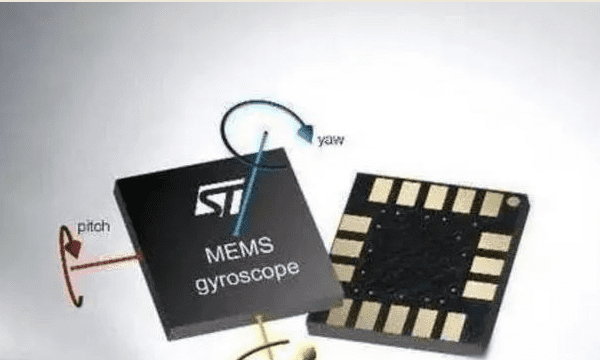
三轴陀螺仪感应器是一个简单易用的基于自由空间移动和手势的定位和控制系统。陀螺仪能够测量沿一个轴或几个轴运动的角速度,可与MEMS加速度计(加速计)形成优势互补,组合使用加速度计和陀螺仪这两种传感器,更好地跟踪并捕捉三维空间的完整运动,提供现场感更强的用户使用体验、精确的导航系统以及其它功能。
三轴陀螺仪最大的作用就是测量角速度,以判别物体的运动状态,所以也称为运动传感器。应用在手机上,三轴陀螺仪就能对用户的手机转动、偏转动作做出较为精准的测量,判断出用户对手机的操作动作,从而进行相应的反馈。下图是手机中的陀螺仪感应器芯片:
扩展资料:
手机“三轴陀螺仪感应器”的应用:
1、体感游戏,以第一人称射击和赛车等竞技类游戏时,可以完全摒弃以前通过方向按键来控制游戏的操控方式,只需要通过移动手机相应的位置,既可以达到改变方向的目的,使游戏体验更加真实、操作更加灵活。
2、相机防抖,可以和手机上的摄像头配合使用,比如防抖,这会让手机的拍照摄像能力得到很大的提升。
3、运动计步。陀螺仪可以测量出手机的角度,从而检测到人体的重心偏移。当人在行走时,手机会随着运动出现角度偏移。陀螺仪检测到持续且有规律的角度偏移时,手机就会开始判断用户正在走路。
陀螺仪不倒的原理是什么
陀螺仪是一种测量角度的传感器。它利用了陀螺效应来测量物体相对于地球重力方向的角度。陀螺效应是指当一个转动的物体呈现给观察者一个偏转角时,物体上置放的任意物体都会呈现一个弯曲的情况,这种现象就是陀螺效应.
陀螺仪中会包含一个转动的转子,当物体旋转时,转子也会随之旋转,而转子旋转的角度就是物体相对于地球重力方向的角度。通常陀螺仪会有三轴,分别对应绕x,y,z轴的旋转角度。

全军出击灵敏度最佳方案
镜头灵敏度是指:在移动和卡点的时候不需要开枪的灵敏度,可以理解为移动灵敏度,较高的不开镜灵敏度可以帮助在移动的时候随时观察周围的情况,被人袭击的时候也可以更快地回击敌人。
射击灵敏度是指:全军出击的射击灵敏度包括两种,不开镜射击和开镜射击,不开镜射击俗称腰射,高灵敏度可以让走位时右手可以更轻松地跟随移动而瞄准敌人。
开镜灵敏度就比较复杂,全军出击的倍镜很多,但是都有一个规律,越高的倍镜灵敏度越低,在使用四倍以上的倍镜时,总会感觉镜头跳动地很厉害,就是因为你的灵敏度设置太高了。
陀螺仪灵敏度是指:在使用高倍镜远距离狙击的时候,很难第一时间瞄准敌人的头部,这个时候如果用手指去进行调节就会浪费很多时间,可能就会被敌人反杀。所以陀螺仪设置一定要选择开镜开启,然后设置合适的陀螺仪灵敏度。

扩展资料:
陀螺仪又叫角速度传感器,是不同于加速度计(G-sensor)的,它的测量物理量是偏转、倾斜时的转动角速度。在手机上,仅用加速度计没办法测量或重构出完整的3D动作,测不到转动的动作的,G-sensor只能检测轴向的线性动作。
但陀螺仪则可以对转动、偏转的动作做很好的测量,这样就可以精确分析判断出使用者的实际动作。而后根据动作,可以对手机做相应的操作。
角速度传感器的原理通俗地说,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。旋转的陀螺遇到外力时,它的轴的方向是不会随着外力的方向发生改变的。骑自行车其实也是利用了这个原理。轮子转得越快越不容易倒,因为车轴有一股保持水平的力量。
以上就是关于陀螺仪感度是什么,航模陀螺仪原理的全部内容,以及陀螺仪感度是什么的相关内容,希望能够帮到您。
版权声明:本文来自用户投稿,不代表【蒲公英】立场,本平台所发表的文章、图片属于原权利人所有,因客观原因,或会存在不当使用的情况,非恶意侵犯原权利人相关权益,敬请相关权利人谅解并与我们联系(邮箱:350149276@qq.com)我们将及时处理,共同维护良好的网络创作环境。